联系我们
上海德萨科电子技术有限公司
上海市徐汇区,宜山路333号,1101-1106室
200030
+86 (0) 21-54248436
+86 (0) 21-54248439
solutions@dsa.com.cn
现代车辆架构正朝着集中式计算和软件定义功能的方向转变。随着这一变革,诊断领域面临着新的需求:分布式应用、动态行为、面向服务的通信以及持续的软件部署。
统一诊断服务(UDS,Unified Diagnostic Services)等传统诊断协议是针对静态、以电子控制单元(ECU)为中心的环境而开发的。这些方法缺乏应对软件驱动组件、高性能计算单元(HPCs)以及基于域的车辆架构所需的灵活性。
面向服务的车辆诊断(SOVD,Service-Oriented Vehicle Diagnostics)提供了一个基于应用程序编程接口(API)的统一界面,用于访问诊断信息和服务。它支持动态软件系统,能够集成到基于云的诊断工作流程中,并可在研发、生产和售后环境中实现一致访问。
重要的是,面向服务的车辆诊断(SOVD)并不仅限于未来的车辆平台。通过现有外部诊断设备上部署相关协议栈,便可引入该技术,从而实现对现有车辆电子控制单元(ECU)的标准化访问。这使得SOVD成为现代化诊断系统的一个实用且具有前瞻兼容性的切入点,无需对现有车内架构进行改动。
通过采用面向服务的车辆诊断(SOVD)技术,主机厂(OEMs)和供应商能够跨不同平台简化诊断访问流程,降低实施复杂度,并使其车辆架构为未来以软件为核心的需求做好准备。
提供一个一致且基于服务的应用程序编程接口(API),支持近场、远程及车载诊断,可实现统一的工作流程。

诊断能力描述和模式定义,无需预先静态编码即可实现客户端的动态行为。
支持访问高性能计算(HPC)平台中的分布式服务、应用程序和日志——其功能超越了传统以电子控制单元(ECU)为中心的诊断能力。

支持持续开发以应对新的诊断应用场景,确保能够面向未来无缝集成至不断演进的车辆架构中。
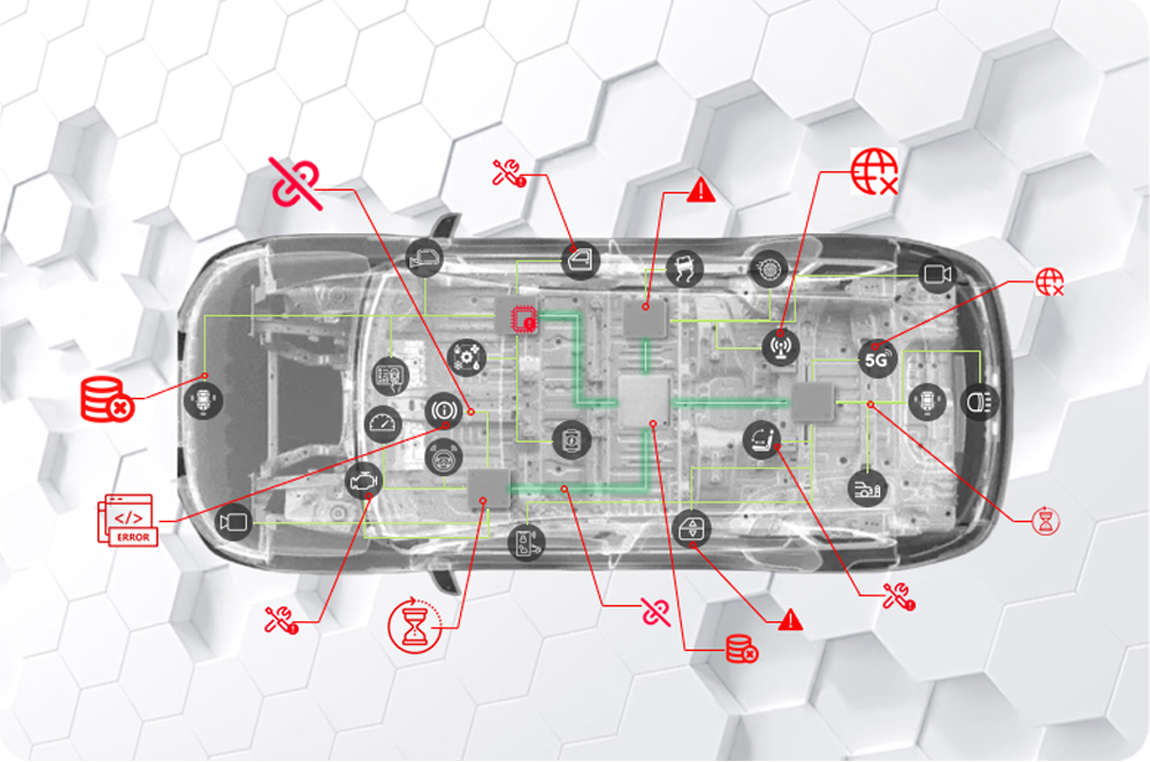
软件定义汽车(SDV)带来的诊断挑战超出了传统协议(如UDS)的设计边界,这些挑战包括:
静态故障模型: UDS 需要预定义的故障代码,这使得在现代软件环境中难以表示动态或与服务相关的故障。
有限的诊断抽象化: UDS与电子控制单元(ECU)的内存布局及内部信号紧密耦合,对抽象或逻辑化的服务接口的支持非常有限。
对高性能计算(HPC)和服务支持不足: 高性能计算单元和基于面向服务架构(SOA)的组件带来了分布式诊断、运行时动态变化以及服务监控等需求,而UDS在设计上并未考虑应对这些挑战。
远程诊断的限制: UDS 中的安全、会话处理和时间假设使得在云或移动网络上实现可靠的远程诊断具有挑战性。
工具和集成碎片化: UDS在实际应用中常因高度定制化需求和工具链碎片化,导致跨工程、生产及售后场景的诊断流程难以保持一致性。
面向服务的车辆诊断(SOVD)构建了一种现代化诊断架构,支持云端集成、动态软件管理,并实现车辆全生命周期各阶段的诊断一致性:
基于云的集成: 诊断流程可无缝集成至IT后端系统与OTA平台,并支持从远程环境安全访问。
服务器端诊断逻辑: 所有诊断解释和控制均位于SOVD服务器上——通常也位于车辆上——从而简化客户端复杂性并确保跨平台的一致执行。
诊断抽象功能: 复杂且上下文敏感的诊断功能可封装为可复用函数,实现与ECU硬件细节或静态定义的解耦。
对分布式架构的支持: SOVD支持跨高性能计算平台(HPC)及云集成车辆系统的诊断,涵盖互联服务、容器化部署与动态负载场景。
扩展诊断访问: 除传统故障与测量数据外,SOVD还支持获取日志文件、运行时跟踪记录及其他面向服务架构(SOA)所必需的结构化诊断工件。
DSA的PRODIS.SOVD是SOVD API的完全标准合规实现,作为诊断客户端与车载系统架构间的中央网关,能够同时支持现代高性能计算(HPC)域与传统ECU网络。
专为覆盖车辆全生命周期(工程研发、生产制造、售后维修及远程访问)而设计,可提供统一诊断接口,且不依赖物理连接方式或系统拓扑结构。其支持与空中下载技术(OTA)更新平台及云端工作流的无缝集成。
PRODIS.SOVD可与高性能计算平台(HPC)原生通信,实现以软件为中心的诊断功能。针对传统控制单元,其集成的经典诊断适配器(CDA)提供SOVD与UDS、J1939、KWP等协议间的协议转换能力,从而在现代化诊断接口的同时保留现有诊断逻辑。
通过打通面向服务架构(SOA)与传统系统两大领域,PRODIS.SOVD使主机厂(OEM)及供应商能够立即采用SOVD标准,而无需对车辆硬件或诊断流程进行即时改造。
在生产制造与售后维修场景中,诊断工具需通过物理连接与车辆交互。而采用面向服务的车辆诊断(SOVD)方案后,邻近客户端可通过统一接口访问车辆的中央及分布式功能,支持故障定位、ECU与高性能计算平台(HPC)配置、执行器测试及下线检测验证。此方案实现了测试与调试阶段工作流程的标准化统一
SOVD支持通过后端或云端系统安全远程访问诊断功能。典型应用场景包括车间预诊断、远程技术支持、车队状态监测、车辆服务激活及软件更新执行。借助PRODIS.SOVD方案,这些任务可脱离底层协议限制,无缝集成至云端服务体系。
诊断应用可直接在车载高性能计算平台(HPC)上运行,充分利用本地计算资源。通过面向服务的车辆诊断(SOVD)应用编程接口(API),这些应用可实时访问运行时信号、触发诊断流程,并采集数据以支持预测性维护——无需依赖外部测试设备。
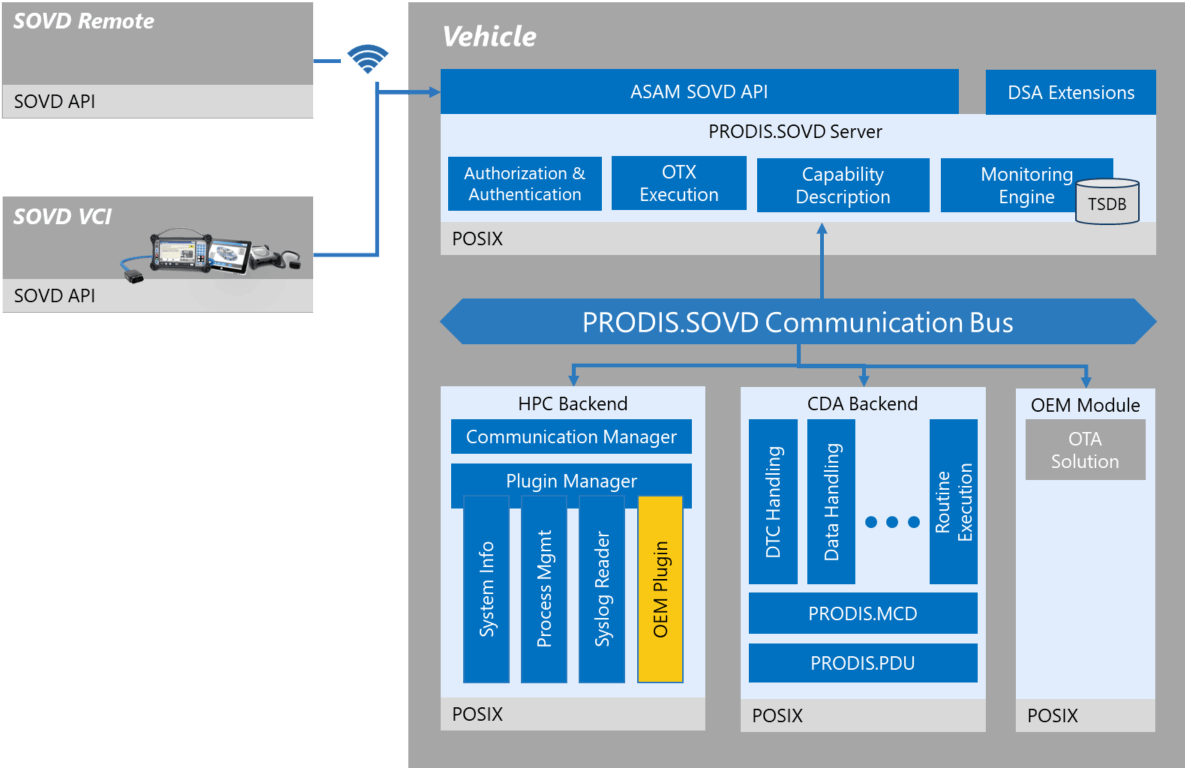
PRODIS.SOVD架构旨在支持跨现代面向服务平台与传统ECU网络的诊断访问。其核心在于,SOVD服务器充当诊断客户端与多样化车载系统之间的标准化网关。
通过模块化后端,服务器既能与基于高性能计算平台(HPC)的软件平台交互,也可使用传统协议连接经典ECU。这种混合架构支持向面向服务的诊断体系逐步迁移,同时确保与现有生产和售后工具链的完全兼容。
DSA的解决方案支持Linux、QNX或Android等符合POSIX标准的操作系统,并支持集成至任意主机厂(OEM)特定环境。
PRODIS.SOVD服务器实现了ASAM SOVD应用编程接口(API),并为近场、远程及车载使用场景提供统一诊断接口。
所有诊断请求均由中央统一管理,确保跨客户端和使用场景的执行一致性——无论连接类型或平台如何。
经典诊断适配器(CDA)后端实现了面向服务的车辆诊断(SOVD)与UDS、J1939和KWP等传统ECU协议的桥接。其基于符合ISO 22900-2/3标准的组件构建,支持标准化诊断数据处理及工具间互操作性。
这实现了现有诊断内容的复用,并为系统迁移提供了平滑路径。
高性能计算(HPC)后端与高性能计算平台及面向服务的车辆功能对接,由此为分布式软件组件、运行时状态、性能指标和日志提供诊断访问能力——实现超越ECU边界的动态系统级诊断。
该后端支持软件定义车辆(SDV)中常见的容器化服务、中间件平台及域控制器架构。
PRODIS.SOVD 支持与诊断工作流程及后端系统的全面集成。它提供对 OTX(ISO 13209)便携式测试序列的支持,并兼容第三方 SOVD 服务器及主机厂(OEM)OTA 平台。
这使得该技术能够在车辆项目和现有基础设施中实现可扩展部署。

DSA助力主机厂(OEM)及供应商定义专属的面向服务车辆诊断(SOVD)架构,涵盖诊断服务模型、能力描述格式,并实现与现有工具链的无缝集成。我们的咨询服务贯穿车辆项目全周期,提供系统设计、合规性指导及落地规划支持。
我们协助电子控制单元(ECU)及系统供应商创建机器可读的面向服务车辆诊断(SOVD)能力描述文件。此类描述文件支持动态服务发现,并可跨平台及车型变体高效实现结构化、可测试的诊断接口。
我们的工具链覆盖车辆全生命周期——从研发到售后——涵盖面向服务车辆诊断(SOVD)客户端、测试环境、仿真系统及远程诊断平台。我们为OTA(空中下载技术)工作流程、车队诊断及车间集成提供高可靠性后端组件。
DSA使得SOVD协议栈能够在车载环境中部署,该协议栈既支持基于高性能计算单元(HPC)的诊断,也支持对传统电子控制单元(ECU)的诊断。这既能确保与现有的统一诊断服务(UDS)基础设施兼容,又能助力向面向服务的架构平稳过渡。
